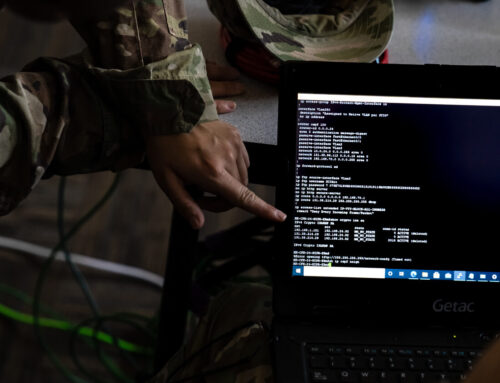

An RCV Light at desert testing. (Original image by Savannah Baldwin/ US Army; Code image by Markus Spiske via Pexels; Graphic by Breaking Defense)
WASHINGTON — Earlier this year, US Army soldiers took a few prototype Robotic Combat Vehicles (RCVs) out for a spin at Fort Irwin, Calif., in a demonstration that cemented in their minds a key issue with the tech’s stated raison d’etre: Right now, it doesn’t keep human soldiers far enough from danger.
The service eventually wants autonomous software to handle the bulk of navigation for its future robotic fleet, but as the service is likely to be sorting out that technological challenge for years, the first RCVs in the field will have to depend on what’s known as a radio “tether.”
As it was arranged at Irwin, that meant five soldiers were packed into a trailing vehicle to control two frontline RCVs — one driver and two teams of two each remotely manning an RCV — that had to stay close enough to maintain the radio link.
In the Army’s vision in which RCVs do dangerous tasks under fire in soldiers’ stead, that distance limitation nearly defeats the purpose.
“We need to get [soldiers] a little further back,” Brig Gen. Geoffrey Norman, then the director of the Next-Generation Combat Vehicle Cross Functional Team, told Breaking Defense shortly before retiring earlier this month.
“If they’re inside the direct fire range, whether it’s from a cannon, direct fire or anti-tank guided missiles, those control vehicles are very vulnerable,” he later added.
While the service has known for several years that its backup teleoperation setup poses technical hurdles, recent demos — including that one at this year’s Project Convergence capstone event — showcased the severity of challenges still looming out ahead as the Army gets ready to potentially field RCVs in fiscal 2028. And with the future of autonomy unclear, the service is now having to consider changing mission sets, concepts of operations and even technical solutions in order to make the tether work.
Still, Army leadership is determined to continue to press ahead, convinced that the only way to get its future fleet of robot vehicles where they need to be is by getting them into the field.
“It’s our first robot system like this [that] we’re actually going to keep,” Army acquisition head Doug Bush said in a recent interview. “So, I’m not surprised that there’s turbulence in the key technologies, including the radio comm link, which is foundational to the whole thing and having that capability … being robust enough.”
“A ground environment is the hardest thing possible, it’s way harder and way harder on equipment than a [unmanned aerial vehicle] UAV,” Bush added.
This is part two of a deep-dive into the future of the Robotic Combat Vehicle program. To read part one, please click here.
Plan B
The RCV is envisioned to be a true front-line combat vehicle, one that would face the teeth of enemy fire and be able to launch munitions in turn. The dream situation for Army planners is a large fleet of RCVs being the first wave of attack, keeping soldiers far enough back that they limit the danger while still being able to win on the battlefield.
After decades of fits and starts trying to field unmanned vehicles, the Army is nearing a decision point in 2027 for when the program needs to move forward. In the interim, they are using surrogate vehicles to test the core autonomy and communications systems, which is where the issue with the teleoperations became clear.
While the Army has not publicly disclosed all the RCV components on contract or what the plans are to acquire them, Jimi Henderson, the vice president of sales at radio firm Silvus Technologies, confirmed that his company’s Streamcaster line has served as the sole RCV radio since 2020.
He declined to discuss program specifics but explained that the radios, and other communications equipment, create an invisible tether designed to provide a “safe standoff distance” between the operator and the ground robot. But that radio tether can break if soldiers are trailing too far behind the robots, obstacles get in the way or an adversary is jamming the radio signals.
Just like a cell phone, he said, as someone gets farther away from the nearest tower, the signal may drop, and the connection becomes degraded. And, depending on the amount of data that person is trying to push over the link, that weaker signal might not be enough.
“So that could be from [a] distance, it could be because of an obstruction, again, penetrating through a field of trees, maybe that signal is not going to go as far,” Henderson said.
While Army leaders have known that this teleoperation setup poses challenges, it’s now getting new insights into just how close soldiers must be to maintain control of those robots and how easy it is for that link to break.
(Douglas Bush, the Assistant Secretary of the Army for Acquisition, Logistics and Technology; Maj. Gen. Glenn Dean, the program executive officer for Ground Combat Systems; and Brig. Gen. Geoffrey Norman, the director of the Next Generation Combat Vehicle Cross Functional Team, arrive during the M10 Booker Dedication Ceremony at Aberdeen Proving Ground, Aberdeen, Md., April 18, 2024. (Christopher Kaufmann/ US Army)
“We learned [at Project Convergence] that there’s a certain distance that’s needed between the control vehicle and the robot to have tactical relevance and that varies depending on the terrain you’re in,” Norman said.
To maintain the connection and keep it from breaking, soldiers currently need to be within 1,000 to 2,000 meters behind the robots in wide-open locations, according to Army sources. But if trees or buildings crop up, that distance can shrink down to 500 meters. Simply put, soldiers are too close to the fight, and they need a greater standoff distance, along with more certainly that will not lose control of the robots so easily.
Army officials who talked to Breaking Defense all acknowledged that the tether isn’t operating the way they had hoped.
“At certain times in the mission, the robot and the control vehicle may need to be communicating frequently and so a lot of bandwidth and a lot of the network that may be committed to the robot,” Norman explained. “At other times in the mission, those robots in the control vehicles can essentially go silent with one another and only send periodic communications.”
“We can’t sort of lock down a whole bunch of bandwidth or a whole section of our network capability exclusively for robots because there are going to be a lot of demands,” the now retired one-star general continued. “So that’s one of the important things that we got out of Project Convergence Capstone 4, we got some of the technical limits that we’re seeking to achieve in there.”
Finding issues during testing is, of course, the reason to run tests. And it should be noted that the tether will be needed for future operations even with autonomy, in order to keep humans in the loop in terms of actual firing of munitions, per US policy.
But not having the autonomy up and running fully means more stress on the tether, and that means the service is now considering changes to their planned concept of operations.
“What you can’t do is have a bunch of them, like 10 robots, move to a position and take on multiple tasks using the radio tether,” one industry source said. “The robots are going to have to make their own decision about terrain. Mobility is a challenge with the radio tether.”
RELATED: ‘Lightning in a bottle’: Inside the ‘Origin’ of the Army’s future robotic fleet
Sources on both the Army and industry side said that the service is working to understand what mission sets are and aren’t possible with the tether’s restrictions.
From his vantage point, Maj. Gen. Glenn Dean, the service’s Program Executive Officer for Ground Combat Systems, told Breaking Defense that right now smoke generating systems to provide a level of cover to soldiers may be a good fit initially a potentially useful mission, but one that falls short of the original use case of the RCV.
Another early option, according to an industry source, is adding a Mine Clearing Line Charge (MICLIC) payload to help soldiers clear minefields. The service has also tested out Kongsberg’s Common Remotely Operated Weapon Station-Javelin on surrogate robots, and that industry source speculated that soldiers could place a robot out two kilometers to be the “eyes and ears” for a fixed site and fire an anti-tank missile at an incoming threat.
Breaking Comms
One thing that could help the Army: figuring out ways to work around the myriad challenges of using the tether to operate the RCV.
Multiple industry sources said the problem is not with the quality of the line-of-sight radios, but the fact they were not designed to be the sole source of control, at a distance that the Army now needs. So now, Silvus — and would-be competitors hoping to get onto the RCV program — are proposing options.
Silvus’s Henderson, for example, said there are a couple of ways to mitigate the challenges, including using a waveforms that uses multiple input multiple output, digital signal processing, and combining it with orthogonal frequency division multiplexing. That combination, he said, enables signals to “bounce around corners” of a building and better penetrate through terrain obstacles like foliage.
Mesh networking is also an option, which would essentially enable every radio to act as a repeater for its neighbors, meaning soldiers with controllers do not need to maintain direct line-of-sight with the robots.
“But no matter how good your radio is, there’s going to be a certain limit you’re going to achieve X distance in line-of-sight and maybe X-minus some amount when you have obstacles,” Henderson said.
Norman, the one-star general who led the RCV requirements until earlier this month, said moving RCV communications, in part, over satellite may be another fix.
“Some of [the RCV communications] may go over a satellite, some of them may be direct line of sight, and there might be other communications needs but we need to have multiple options there,” he added. “And, those communications need to be dynamic.”
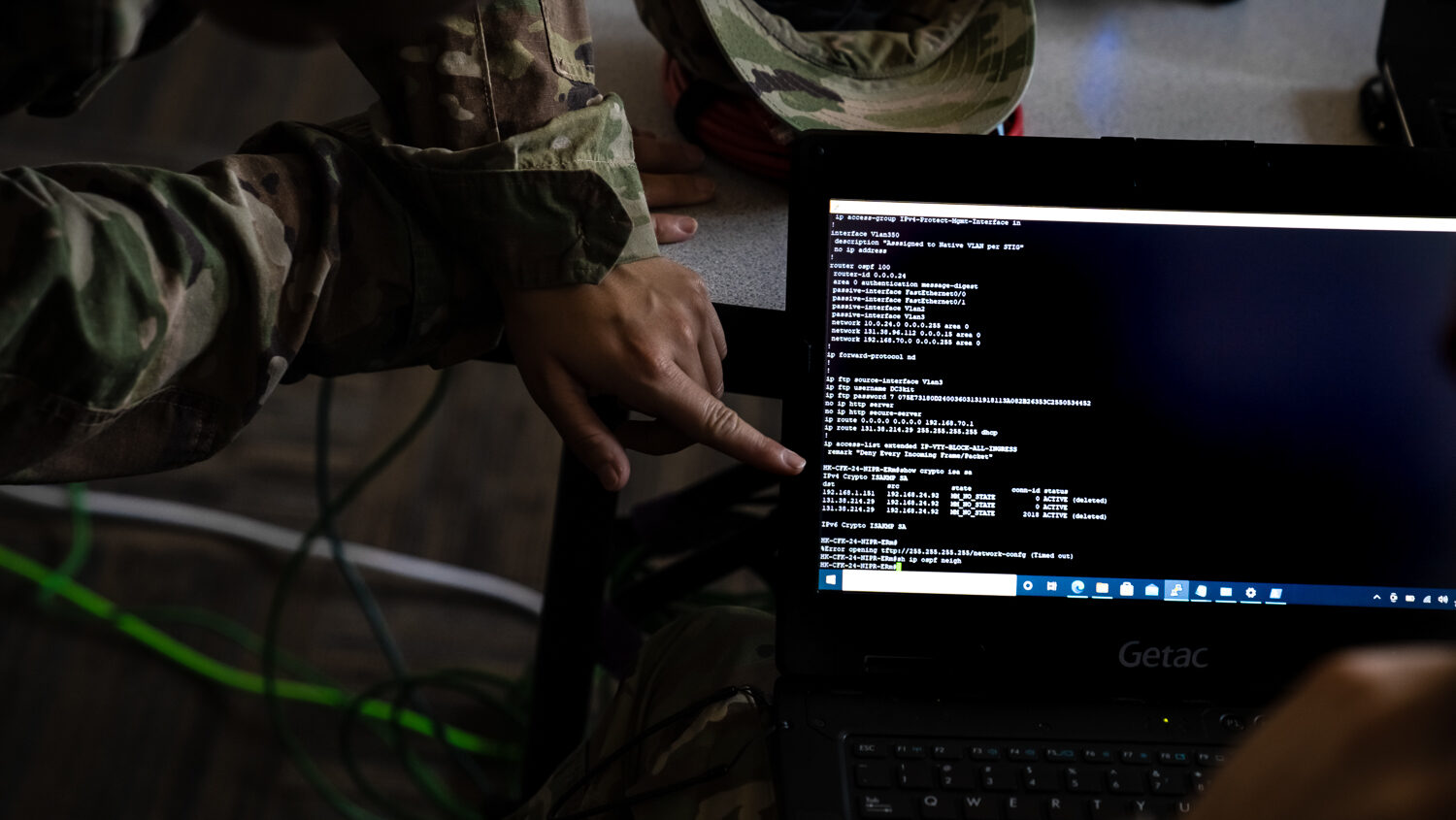
A Robotic Combat Vehicle Light surrogate during soldier experimentation at the National Training Center at Fort Irwin, Calif. from July to September 2023. (Savannah Baldwin/ US Army)
One Army source explained that it wouldn’t be “horribly hard” to add a Starlink or persistent Lower Earth Orbit satellite communication terminal into the mix, and essentially make the internet the tether connecting soldiers to the robots. This potential move is not unheard of, and the Estonian-made THeMIS is already slated to feature Starlink.
However, if some of the communications between soldiers and robots is moved over to satellites, Dean said he is concerned latency may become a problem.
“We want very long range, we want very high acuity … I want the equivalent of 4k [high-resolution] video but in order to have effective control, I have to have a very low latency,” the two-star general explained.
“You can solve the range problem by going to satellite but then you have much greater latency because … [soldiers may] get more than about 250 milliseconds of latency” which is a problem for soldiers driving in a control vehicle at 20 mph trying to control the robots and could cause them to “overcorrect” the robots.
For most tactical scenarios, the two-star general added, this wouldn’t matter. But if soldiers in the control vehicle are driving fast or on the attack and trying to get the RCVs to fire a lethal round, “that short burst latency matters.” In short, the round fired from the RCV could miss its target and hit something else.
All of which is to say that while the Army and industry are open to ideas, a clear-cut solution doesn’t appear imminent. In the meantime, the service will keep testing its systems out, hoping eventually to find a solution that will unlock the RCV’s ability to keep soldiers as far back from the front lines as possible.